ซินจู๋, ไต้หวัน–(BUSINESS WIRE)–05 กุมภาพันธ์ 2564
แม้จะมีการนำไปใช้ในการผลิตอย่างแพร่หลาย หุ่นยนต์ยังคงจำเป็นต้องได้รับการพัฒนาเรื่องความคล่องแคล่วอยู่มากเพื่อนำไปใช้ทางด้านการพยาบาลและการฟื้นฟู ด้วยเหตุผลนี้ ทีมวิจัยสหวิทยาการซึ่งนำโดยศาสตราจารย์ James Chang แห่งภาควิชาวิศวกรรมเครื่องกลกำลัง จึงได้นำเทคโนโลยีใหม่ล่าสุดทางด้านปัญญาประดิษฐ์หรือ AI ชีวกลศาสตร์ และปัจจัยมนุษย์วิศวกรรมมาประยุกต์เข้าด้วยกันเพื่อพัฒนาหุ่นยนต์ที่สามารถเลียนแบบการเคลื่อนไหวมือของมนุษย์ได้อย่างแม่นยำ โดยมือของหุ่นยนต์ที่ได้รับการพัฒนาให้มีสัมผัสที่แม่นยำและสายตาที่เฉียบคมนี้ยังมีความคล่องแคล่วมากพอที่จะสามารถจับลูกบอลและหยิบกระดาษทิชชู่
เอกสารประชาสัมพันธ์นี้ประกอบด้วยเนื้อหามัลติมีเดีย ดูอย่างเต็มรูปแบบที่นี่: https://www.businesswire.com/news/home/20210204005049/en/
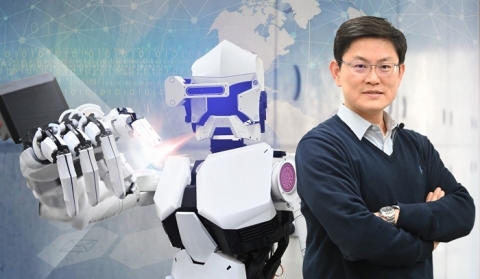
ทีมวิจัยสหวิทยาการซึ่งนำโดยศาสตราจารย์ James Chang แห่งภาควิชาวิศวกรรมเครื่องกลกำลัง ได้พัฒนาหุ่นยนต์ฮิวแมนนอยด์ที่สามารถเลียนแบบการเคลื่อนไหวมือของมนุษย์ได้อย่างแม่นยำ (รูปภาพ: มหาวิทยาลัยแห่งชาติชิงหวา)
หุ่นยนต์ที่มีสองมือและมาพร้อมความคล่องแคล่วนี้ได้รับการออกแบบและพัฒนาขึ้นในไต้หวันในทุกขั้นตอน และถูกตั้งชื่อให้ว่า “Tsing-Hua Gentleman” โดยอธิการบดีมหาวิทยาลัยแห่งชาติชิงหวา Hocheng Hong ผู้ซึ่งกล่าวว่าเจ้าหุ่นยนต์ตัวนี้ถูกกำหนดมาให้มีบทบาทสำคัญทางด้านการให้บริการทางการแพทย์
ความคล่องแคล่วขั้นสูงของหุ่นยนต์
สิ่งที่ทำให้หุ่นยนต์ตัวนี้แตกต่างจากหุ่นยนต์อื่น ๆ คือมือข้างหนึ่งของมันถูกออกแบบให้มีความแข็งแรง ขณะที่มืออีกข้างจะมีความคล่องแคล่วสูงมาก Chang กล่าวว่ามือที่มีความคล่องแคล่วนั้นจำเป็นสำหรับการทำงานกับเครื่องมือทางการแพทย์ส่วนใหญ่ เช่น ในการทดสอบเชื้อ covid-19 ซึ่งมือจะต้องมีความคล่องแคล่วมากพอสำหรับใช้สำลีในการการเก็บตัวอย่างส่งตรวจ (swab) ทางจมูกหรือช่องคออย่างอ่อนโยน เพื่อก้าวข้ามขีดจำกัดแขนกลในหุ่นยนต์ที่มีข้อต่อหกแกน แขนกลในหุ่นยนต์ของ Chang ถูกออกแบบให้มีทั้งหมดเจ็ดแกนทำให้เคลื่อนไหวได้อย่างคล่องแคล่วกว่าแม้แต่แขนของมนุษย์ หุ่นยนต์ที่พัฒนาโดยทีมของ Chang สามารถเลียนแบบการเคลื่อนไหวของมือมนุษย์ได้อย่างใกล้เคียงโดยนำการเคลื่อนไหวของมือมนุษย์มาทำให้อยู่ในรูปแบบดิจิทัลเพื่อให้ได้ระดับความคล่องแคล่วเทียบเท่าและทำให้หุ่นยนต์มีความคล่องแคล่วมากพอที่จะอุ้มทารกหรือแม้แต่ช่วยพลิกตัวผู้ป่วยติดเตียงได้
การรับรู้เทียบเท่ามนุษย์
Chang อธิบายไว้ว่ามือที่มีความคล่องแคล่วนี้เลียนแบบมาจากโครงสร้างนิ้วของมนุษย์ โดยใช้ระบบส่งกำลังนิวเมติกควบคุมการเคลื่อนไหว และอุปกรณ์วัดแรงกดที่ได้รับสิทธิบัตรของสหรัฐอเมริกาซึ่งมีความแม่นยำและสามารถตอบสนองต่อการเปลี่ยนแปลงของแรงแม่เหล็กได้ ขณะที่หุ่นยนต์อื่น ๆ ต้องใช้เซ็นเซอร์แบบแยกสำหรับการเคลื่อนไหวแต่ละทิศทาง แต่แขนกลในหุ่นยนต์ของ Chang นั้นสามารถตรวจจับทิศทางต่าง ๆ ได้โดยใช้เซ็นเซอร์เพียงตัวเดียวซึ่งทำให้มือของหุ่นยนต์เหมือนกับมือของมนุษย์มากขึ้น นอกจากนี้ยังมีระบบภาพแบบสามมิติสำหรับสแกนวัตถุรอบตัวในระยะกว้างที่ทำให้หุ่นยนต์ตัวนี้สามารถระบุลักษณะของพื้นที่และสามารถใช้ AI ในการระบุชนิดของวัตถุได้
แรงบันดาลใจ
Chang ซึ่งจบปริญญาเอกจากมหาวิทยาลัยคาร์เนกีเมลลอนในสหรัฐอเมริกาเคยร่วมงานกับ IBM มาก่อนหน้านี้ โดยเขาเป็นผู้ที่เชี่ยวชาญทางด้านเมคคาทรอนิกส์และหุ่นยนต์ หลังกลับมาไต้หวัน เขาได้พบและร่วมงานกับอดีตเพื่อนร่วมชั้นประถม Yu-Cheng Pei ซึ่งเป็นแพทย์ด้านเวชศาสตร์ฟื้นฟูอยู่ที่โรงพยาบาลฉางเกิงเมโมเรียล โดยได้รับการสนับสนุนจากกระทรวงวิทยาศาสตร์และเทคโนโลยีเพื่อพัฒนาอุปกรณ์ช่วยเหลือสำหรับผู้ป่วยที่การทำงานของมือมีความบกพร่อง
แรงบันดาลใจเริ่มแรกของ Chang ต่อการพัฒนาหุ่นยนต์ตัวนี้มาจากการที่ภรรยาของเขาดูโทรทัศน์และเจอหุ่นยนต์ที่สามารถทำอาหารได้ “ผมบอกกับเธอว่านั้นเป็นเพียงแค่แอนิเมชันเท่านั้น แต่เธอขอร้องผมและจริงจังกับมันมากจนผมสัญญาว่าจะประดิษฐ์หุ่นยนต์ที่สามารถทำอาหารได้จริง ๆ ให้กับเรา” Chang กล่าวพร้อมรอยยิ้ม
ไต้หวันจะกลายเป็นสังคมของผู้สูงวัยแบบเต็มขั้นภายในปี 2568 นี้ ดังนั้น Chang จึงตั้งเป้าที่จะพัฒนาหุ่นยนต์ที่สามารถให้บริการที่จำเป็นต่อผู้สูงอายุได้อย่างหลากหลาย และแน่นอนว่าการทำอาหารและการล้างจานเป็นหนึ่งในความสามารถนั้น
ดูเนื้อหาต้นฉบับที่ businesswire.com: https://www.businesswire.com/news/home/20210204005049/en/
ติดต่อ:
Holly Hsueh
มหาวิทยาลัยแห่งชาติชิงหวา
(886)3-5162006
อีเมล: hoyu@mx.nthu.edu.tw
เนื้อหาใจความในภาษาต้นฉบับของข่าวประชาสัมพันธ์ฉบับนี้เป็นฉบับที่เชื่อถือได้และเป็นทางการ การแปลต้นฉบับนี้จึงมีจุดประสงค์เพื่ออำนวยความสะดวกเท่านั้น และควรนำไปเทียบเคียงอ้างอิงกับเนื้อหาในภาษาต้นฉบับ ซึ่งเป็นฉบับเดียวที่มีผลทางกฎหมาย